Giới thiệu #
Quarky có thể biến thành Gripper Robot rất dễ dàng. Robot tay kẹp bổ sung khả năng kẹp đồ vật và thực hiện các nhiệm vụ gắp và đặt.
Robot tay kẹp cũng có thể được lập trình để tự động chọn và đặt các đồ vật như Robot giao bánh Pizza.
Lắp ráp #

Thực hiện theo các bước:
Chúng ta sẽ bắt đầu với robot nằm ngang thông thường:
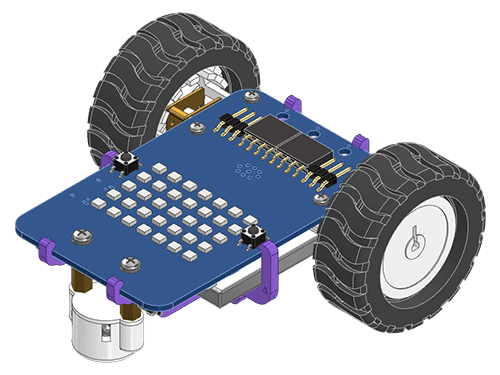
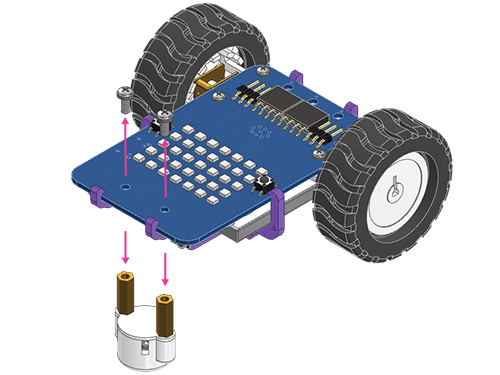
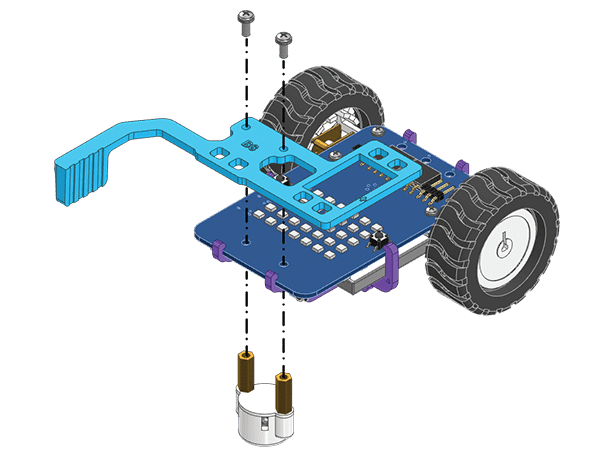
- Bắt đầu bằng cách tháo bánh xe đa hướng khỏi Robot bằng Tua vít.

- Tiếp theo, gắn Tấm B6 vào Quarky Robot bằng Bánh xe đa hướng và Bu lông M2.5 . Siết chặt nó bằng Tuốc nơ vít .

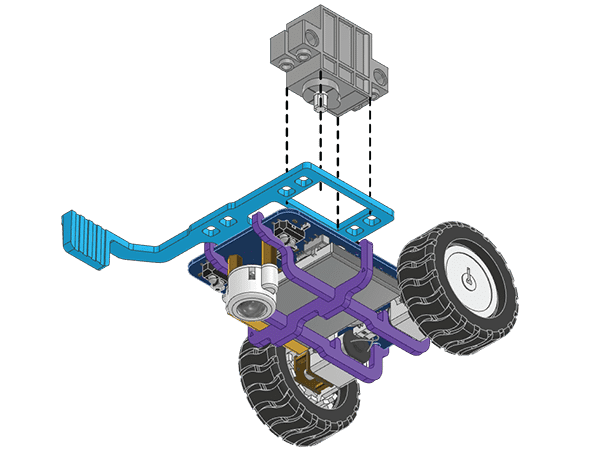
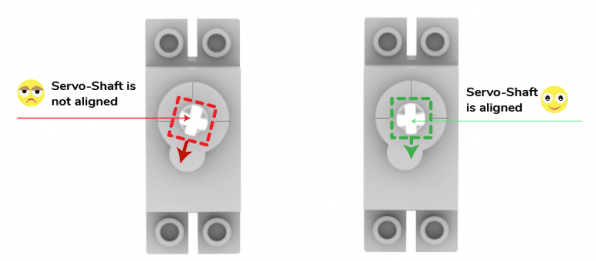
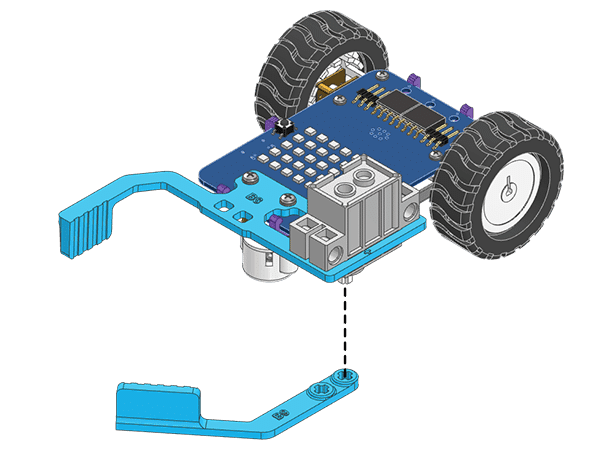
- Tiếp theo, gắn Động cơ servo Geek vào Tấm B6 như trong hình. Đảm bảo hướng của Động cơ servo hướng xuống dưới và Trục servo được căn chỉnh theo hình.
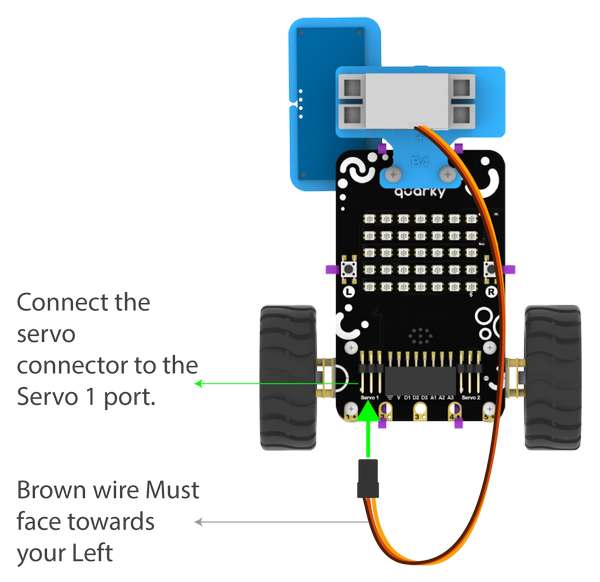
- Kết nối Động cơ servo với Quarky .

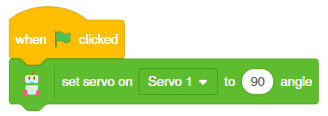
- Mở PictoBlox và đặt góc Động cơ servo thành 90 độ. Đầu servo phải được căn chỉnh chính xác.


- Gắn tấm B9 vào trục động cơ servo .

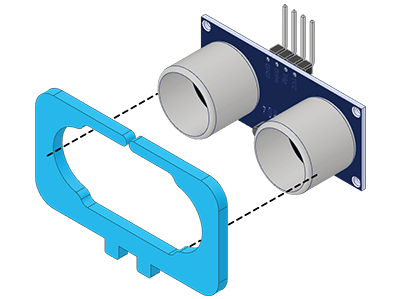
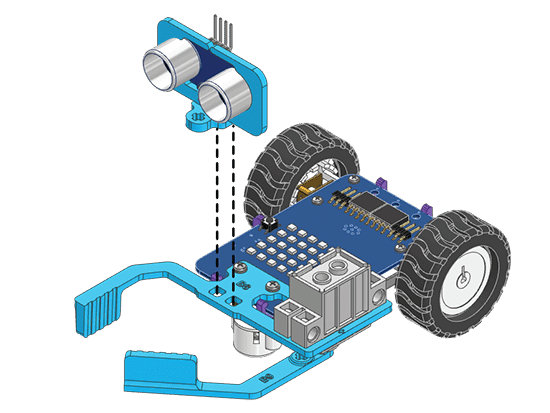
- Đẩy cảm biến siêu âm vào tấm B2 .

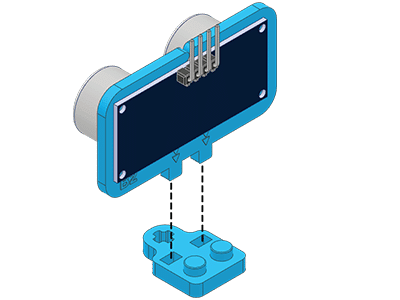
- Đẩy Tấm B2 vào Tấm B7 như trong hình.

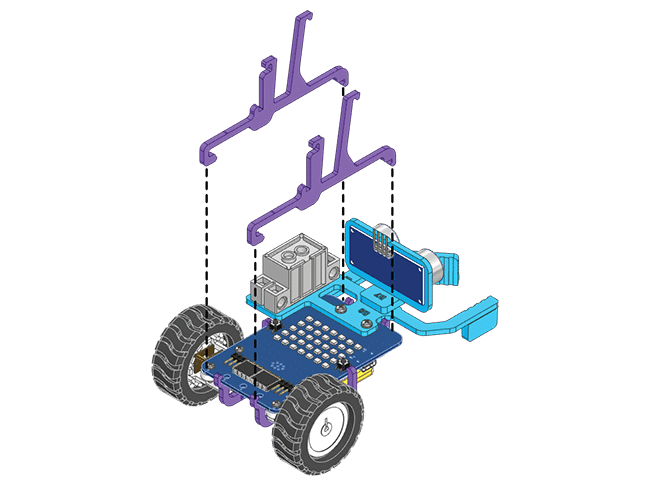
- Gắn Tấm B7 vào Mặt trước của Tấm B8 như trong hình. Đảm bảo Tấm B7 được gắn chặt.

- Gắn các tấm A3 vào Quarky Robot như trong hình.

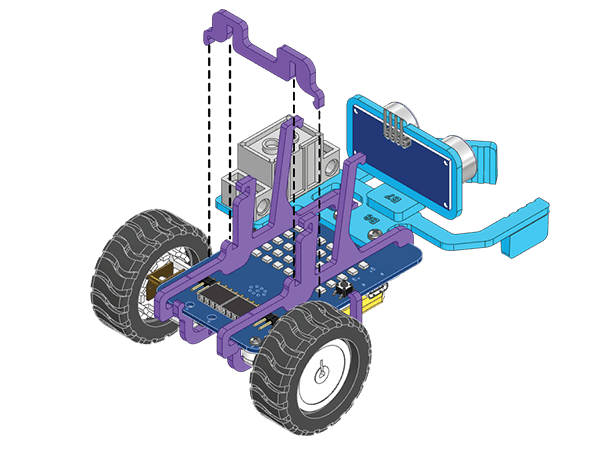
- Khóa tấm A3 bằng tấm A4 .

- Kết nối Cảm biến Siêu âm với Robot Quarky theo sơ đồ sau.

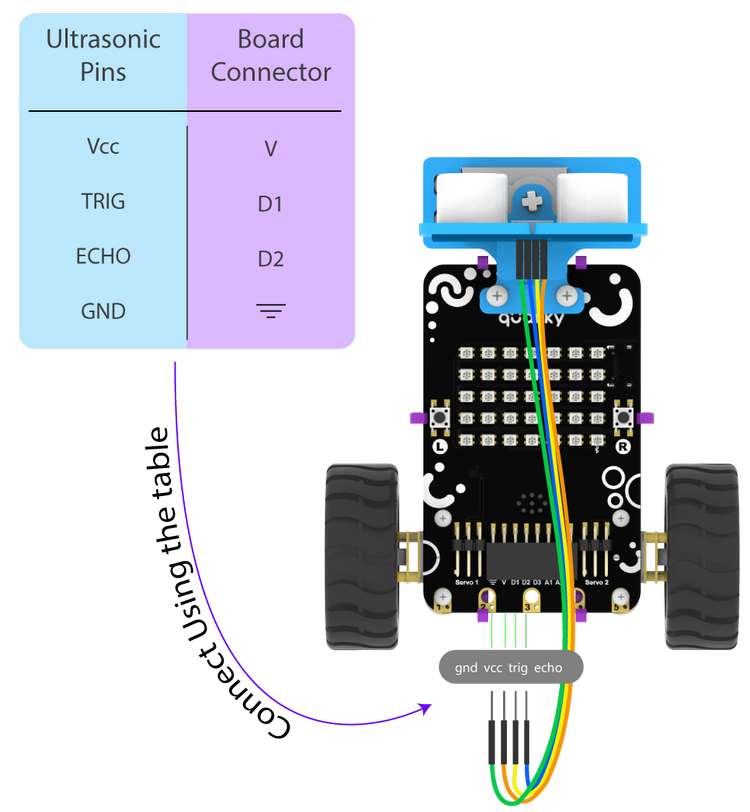
Robot của bạn đã sẵn sàng.
Dự án – Chế tạo Robot tay kẹp điều khiển bằng tay #
Bây giờ chúng ta sẽ lập trình cho robot tay gắp! Robot tay gắp có thể kẹp các hộp và đặt chúng.
Hãy bắt đầu nào!
- Bây giờ, hãy mở PictoBlox và mở một dự án mới bằng cách chọn New từ file trên thanh công cụ
- Kết nối Quarky với PictoBlox.
Thiết lập sân khấu #
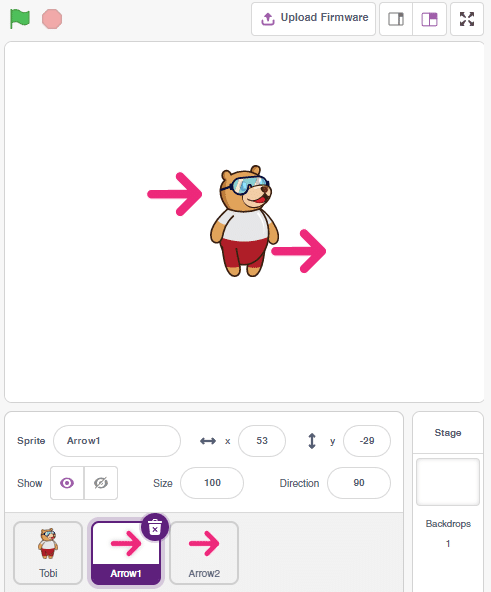
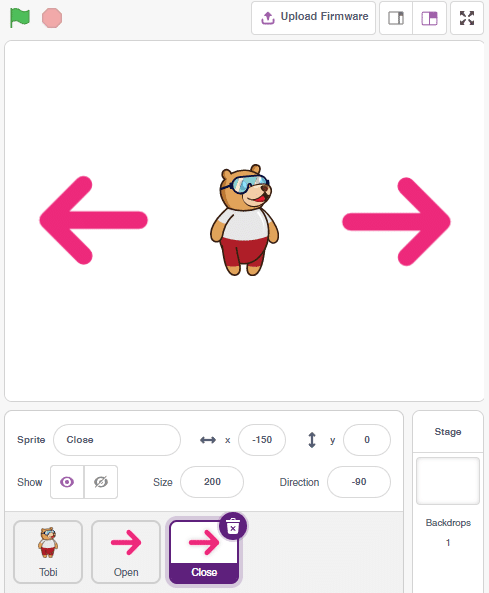
- Thêm 2 hình mũi tên vào sân khấu từ thư viện.

- Đổi tên các nhân vật Mũi tên thành Open và Close .
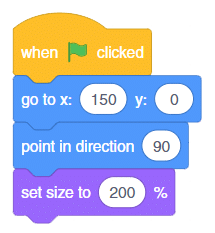
- Nhấp vào nhân vật Open và thêm tập lệnh để chuyển đến 150, 0 vị trí, trỏ ở 90 độ và đặt kích thước thành 200%.

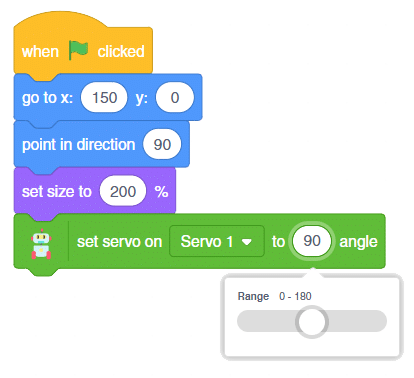
- Thêm khối set servo on () to () angle và đặt góc thành 90 độ. Thao tác này sẽ đặt kẹp mở khi mã bắt đầu.

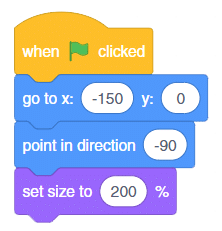
- Nhấp vào nhân vật Close và thêm tập lệnh để chuyển đến -150, 0 vị trí, trỏ đến -90 độ và đặt kích thước thành 200%.

- Cuối cùng nhấn vào lá cờ xanh để thiết lập sân khấu.

Kiểm soát kẹp #
Bộ kẹp có các góc điều khiển sau:
- Mở – 90 độ
- Đóng – 170 độ
Hãy mã hóa nó.
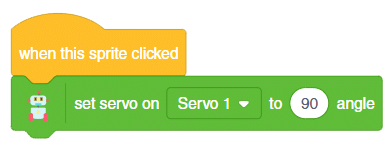
Nhân vật Mở #
- Nhấp vào mũi tên Open và thêm khối when the sprite is clicked từ bảng Control . Điều này sẽ bắt đầu tập lệnh khi nhấp vào mũi tên mở.
- Thêm khối set servo on () to () angle và đặt góc thành 90 độ.
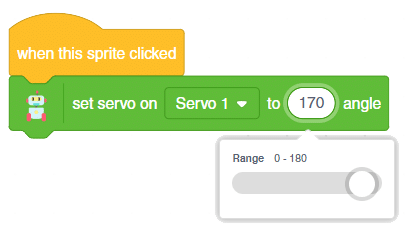
Nhân vật Close #
Bấm vào mũi tên Close và thêm mã tương tự như mở. Lần này đặt góc thành 170 độ.
Kịch bản đã hoàn tất. Kiểm tra mã với robot.
Kiểm soát không dây #
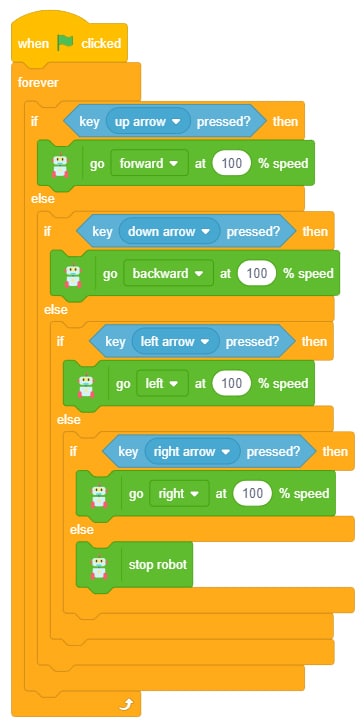
Chỉ còn một việc duy nhất là tạo ra sự điều khiển cho robot di chuyển tiến, lùi, trái, phải. Điều này chúng tôi đã thực hiện trong phần Điều khiển Robot của bạn không dây.
Nhấp vào Tobi và tạo tập lệnh tương tự.
Chơi với Robot #
Bây giờ mã đã hoàn tất. Bạn có thể kiểm tra mã và bắt đầu chơi với robot.



