 |
Giới thiệu #
Cấu hình dọc 3 bánh Quarky giúp bạn tạo các dự án như Robot bắt chước biểu cảm, Robot thú cưng, Robot đèn giao thông, v.v.
Trong robot này, 2 động cơ chủ động điều khiển các bánh xe và một bánh xe thụ động ở phía sau robot. Sử dụng động cơ, bạn có thể điều khiển robot tiến, lùi, trái và phải một cách dễ dàng.
Lắp ráp #
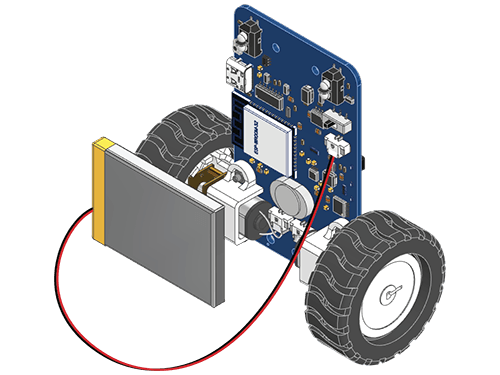
Thực hiện theo các bước để lắp ráp Robot dọc từ robot ngang tiêu chuẩn. Robot nằm ngang trông như thế này:

- Tháo Khóa Giá đỡ Pin và sau đó là Giá đỡ Pin . Nhẹ nhàng tháo ra khỏi các cạnh.
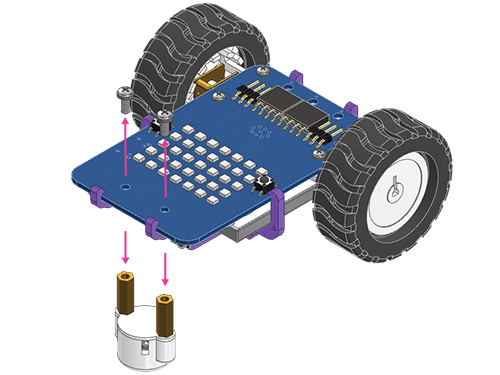
- Tháo Bánh xe đa hướng khỏi Robot bằng Tuốc nơ vít .

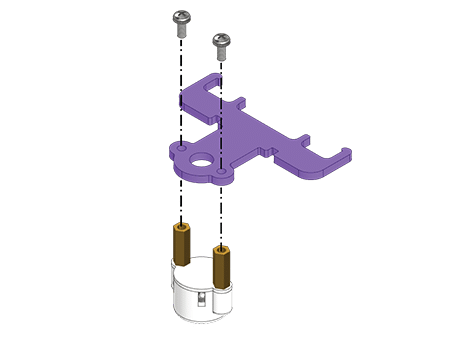
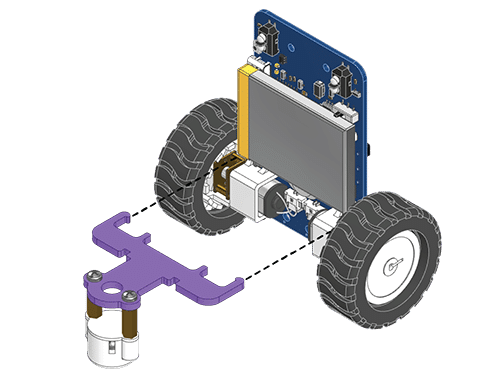
- Gắn Bánh xe đa hướng vào Tấm nhựa tím bằng cách sử dụng cùng loại Bu-lông M2.5 được sử dụng ở bước cuối cùng.

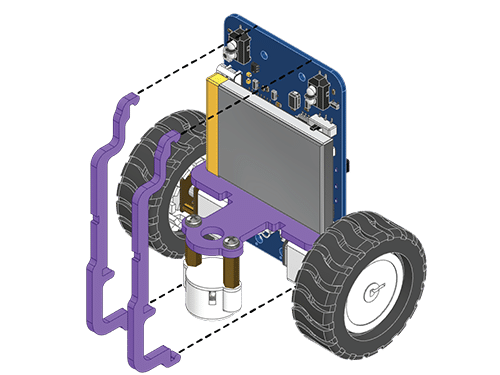
- Gắn pin vào Robot .
- Gắn Tấm bánh xe vào mặt sau của Robot như minh họa.
- Gắn Giá đỡ pin và Khóa giá đỡ pin để cố định pin.

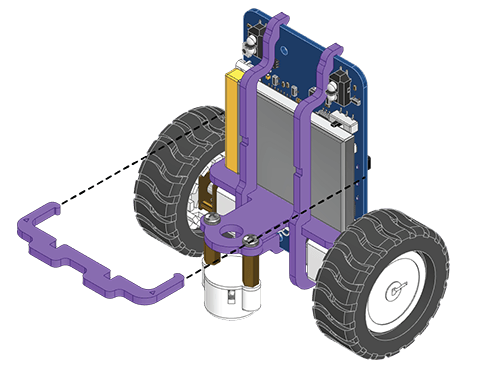
Robot của bạn đã sẵn sàng.
Dự án 1 – Chế tạo hệ thống phát hiện bàn tay #
Trong hoạt động này, chúng ta sẽ làm cho Quarky phát hiện bàn tay.
Quarky có 2 cảm biến hồng ngoại mà chúng tôi sẽ sử dụng.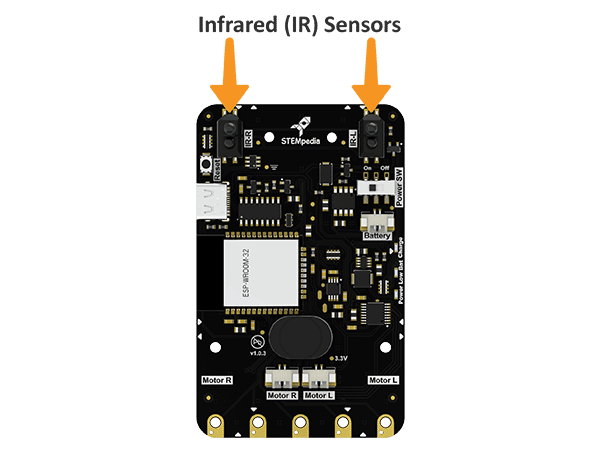
Một cảm biến hồng ngoại bao gồm 2 đèn LED: một đèn truyền ánh sáng hồng ngoại và một đèn nhận ánh sáng hồng ngoại. Khi tia hồng ngoại được truyền đi, chúng phản xạ từ bề mặt gần nhất và quay trở lại đèn LED thu. Đó là cách cảm biến hồng ngoại phát hiện vật thể.
Chúng ta có thể nhận các giá trị cảm biến trong PictoBlox dựa trên giá trị đó. Chúng ta có thể ước tính liệu có trở ngại hay không.
- Nếu cảm biến không phát hiện thấy gì, giá trị đầu ra của nó sẽ tăng lên. Điều này có nghĩa là cảm biến đang hoạt động.
- Nếu phát hiện chướng ngại vật, giá trị đầu ra của nó sẽ giảm. Điều này có nghĩa là cảm biến không hoạt động.
Trước tiên, chúng ta cần hiệu chỉnh các cảm biến hồng ngoại, tức là đảm bảo chúng hoạt động tốt. Vì vậy, chúng tôi sẽ tạo một tập lệnh trong PictoBlox để hiệu chỉnh chúng.
Tìm các giá trị ngưỡng #
- Mở một dự án mới bằng cách chọn New từ file trên thanh công cụ.
- Kết nối Quarky với PictoBlox.
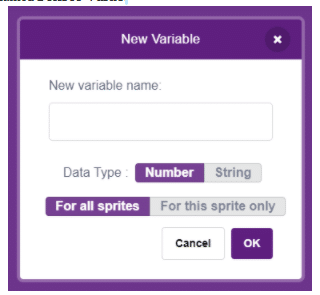
- Vào bảng Variables và tạo hai biến có tên L và R .

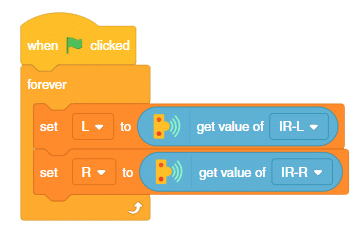
- Tiếp theo, tạo tập lệnh sau để cập nhật giá trị biến thành giá trị cảm biến hồng ngoại bên trái và bên phải.

- Bạn sẽ nhận thấy rằng nó xuất hiện ở góc trên bên trái của sân khấu. Chúng tôi sẽ sử dụng các biến để xác định giá trị ngưỡng cho cảm biến hồng ngoại của mình.

- Lưu ý các giá trị của cảm biến hồng ngoại trái và phải khi không có chướng ngại vật phía trước robot. Ví dụ: trong trường hợp trên:
- L_Cao = 4095
- R_Cao = 4095
- Lưu ý giá trị của cảm biến IR trái và phải khi bạn đặt tay trước robot:
- L_Thấp = 1700
- R_Thấp = 2200
- Tiếp theo, tính trung bình để lấy giá trị ngưỡng:
- L_T = (L_Cao + L_Thấp)/2 = 2897
- R_T = (R_Cao + R_Thấp)/2 = 3147
Hãy nhớ những giá trị này.
Nhận phản hồi qua đèn LED #
Bây giờ, để kiểm tra xem giá trị này có hoạt động tốt cho cảm biến của chúng ta hay không, hãy thêm một vòng phản hồi, thứ gì đó sẽ cho biết rằng cảm biến đã phát hiện ra đường màu đen.
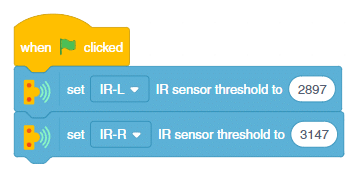
- Thêm khối khi nhấp vào cờ từ bảng Sự kiện .
- Đi tới bảng Cảm biến và thêm hai tập () ngưỡng cảm biến IR vào khối () và ghi giá trị ngưỡng bạn tìm thấy ở trên.

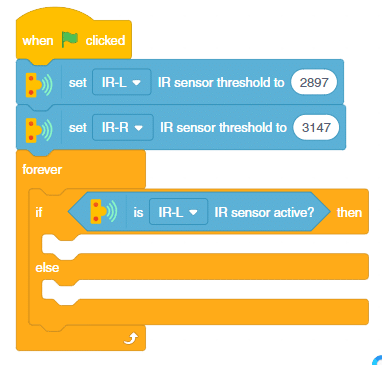
- Tiếp theo, thêm khối forever từ bảng Control. Chúng tôi đang sử dụng khối này vì chúng tôi muốn kiểm tra xem cảm biến có phát hiện đường dây liên tục hay không.
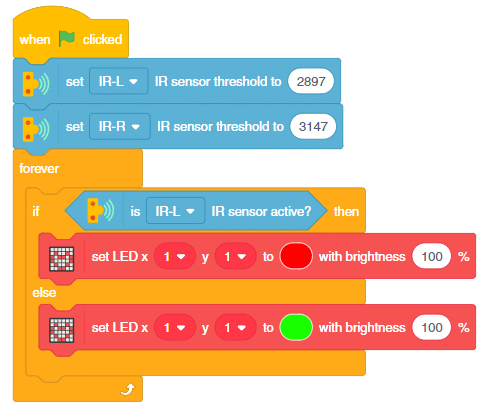
- Sau đó, thêm khối if-else vào bên trong khối mãi mãi.
- Tiếp theo, vào bảng Sensors và thêm khối is () IR sensor active? – cho biết cảm biến IR đang hoạt động hay không- vào bên trong khoảng trắng của khối if-else. Cảm biến hồng ngoại sẽ hoạt động khi phát hiện đường màu đen. Điều này có nghĩa là giá trị của nó phải lớn hơn giá trị ngưỡng. Khối này về cơ bản sẽ kiểm tra xem giá trị cảm biến có lớn hơn giá trị ngưỡng hay không.

- Để cho biết cảm biến đang hoạt động, hãy làm sáng một trong các đèn LED của ma trận điểm. Từ bảng Display , thêm một set LED x () y () to () with brightness () dưới nhánh if của khối if-else. Điều chỉnh màu thành màu Đỏ từ trình đơn thả xuống bằng cách nhấp vào vòng tròn màu trên khối.
- Nhân đôi khối và thả nó dưới nhánh else của khối if-else. Điều chỉnh màu thành màu Xanh

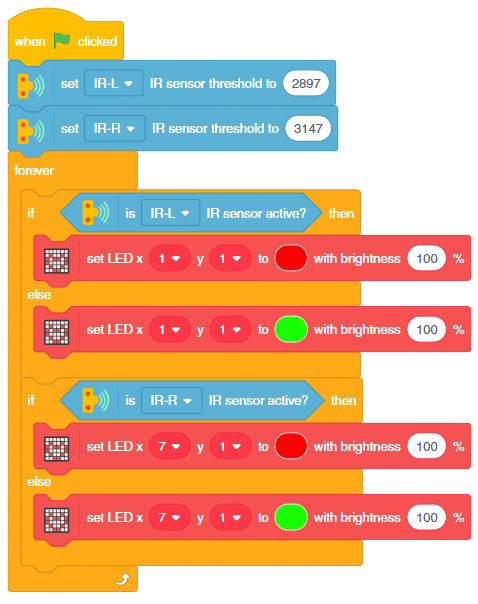
- Nhân đôi khối if và thay đổi cảm biến thành IR-R.
Chạy chương trình và kiểm tra mã.
Dự án 2: Làm Robot-Pet #
Mục tiêu là làm cho robot thực hiện một số hành động nhất định khi phát hiện bàn tay:
- Khi cảm biến bên trái phát hiện thấy bàn tay, hãy rẽ trái.
- Khi cảm biến bên phải phát hiện thấy bàn tay, hãy rẽ phải.
- Khi cả cảm biến bên trái và bên phải đều phát hiện thấy bàn tay, hãy giới thiệu Quarky và mỉm cười.
- Khi không phát hiện được gì, không làm gì cả.
Hãy viết mã #
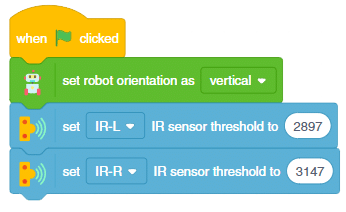
- Thêm khối when flag clicked từ bảng Sự kiện – Events .
- Đi tới bảng Sensors và thêm hai khối set () IR sensor thresholds to () và viết giá trị ngưỡng bạn tìm thấy trong bài học trước.
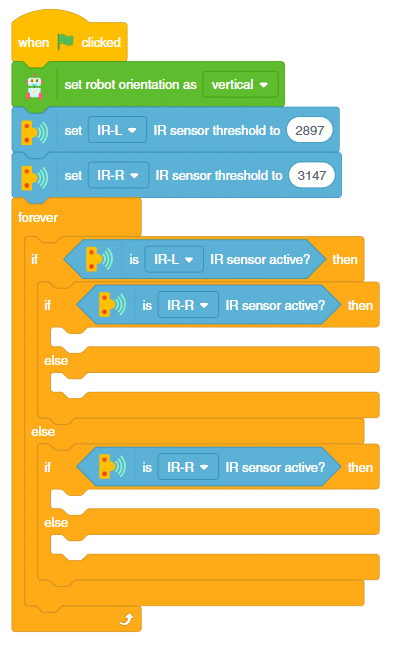
- Thêm khối robot orientation as () và đặt hướng theo chiều dọc (vertical).

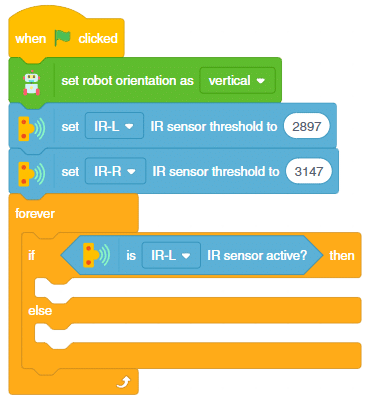
- Tiếp theo, thêm khối forever từ bảng Control. Chúng tôi đang sử dụng khối này vì chúng tôi muốn kiểm tra xem cảm biến có phát hiện đường dây liên tục hay không.
- Sau đó, thêm khối if-else vào bên trong khối mãi mãi.
- Tiếp theo, vào bảng Sensors và thêm is () IR sensor active? khối bên trong khoảng trắng của khối if-else. Cảm biến hồng ngoại sẽ hoạt động khi phát hiện đường màu đen. Điều này có nghĩa là giá trị của nó phải lớn hơn giá trị ngưỡng. Khối này về cơ bản sẽ kiểm tra xem giá trị cảm biến có lớn hơn giá trị ngưỡng hay không.

- Nhân đôi khối if và đặt nó vào trong hai nhánh của khối if. Thay đổi giá trị thành IR-L.

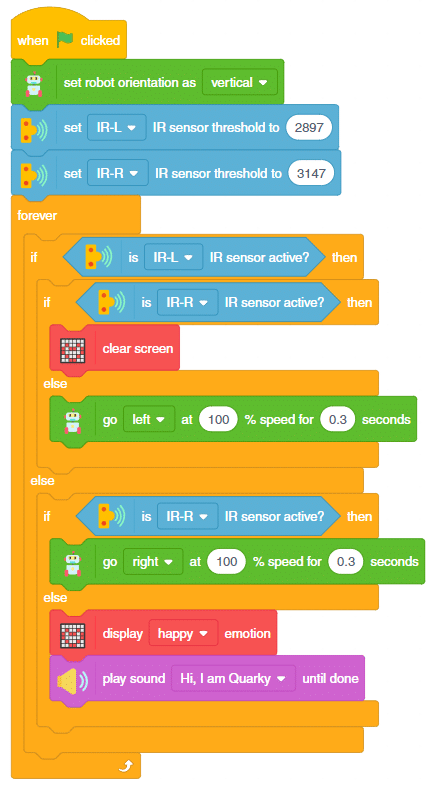
- Bây giờ chúng ta có bốn nhánh đều biểu thị bốn điều kiện. Chúng ta hãy đi qua nó từng cái một.
- Trường hợp đầu tiên là khi không phát hiện thấy bàn tay nào. Thêm một khối xoá màn hình Clear screen từ bảng Display.
- Trường hợp thứ hai là khi cảm biến IR-R phát hiện bàn tay. Trong trường hợp này, robot sẽ rẽ trái. Thêm khối go () at () % speed for () seconds từ bảng Robot . Đặt hướng sang trái (Left) và thời gian là 0,3 giây.
- Trường hợp thứ ba là khi cảm biến IR-L phát hiện bàn tay. Trong trường hợp này, robot sẽ rẽ phải. Thêm khối go () at () % speed for () seconds từ bảng Robot . Đặt hướng sang phải (Right) và thời gian là 0,3 giây.
- Cuối cùng, cả hai cảm biến đều phát hiện bàn tay. Làm cho Robot mỉm cười và phát âm thanh – Xin chào, tôi là Quarky sử dụng khối play sound () until done.
Mã đã hoàn tất.
Chạy và kiểm tra nó.
Kết luận #
Tóm lại , cấu hình dọc dẫn động 2 bánh của Quarky cho phép người dùng tạo nhiều dự án khác nhau như Robot đánh dấu biểu hiện, Robot thú cưng, Robot đèn giao thông, v.v. Bài viết này cung cấp hướng dẫn từng bước về cách lắp ráp và lập trình robot cho hai dự án khác nhau. Với sự trợ giúp của robot này và phần mềm PictoBlox, người dùng có thể dễ dàng tạo các dự án robot của mình .



