Cách khắc phục các sự cố thường gặp liên quan đến động cơ của Quarky. Là động lực thúc đẩy sự chuyển động của Quarky, điều cần thiết là phải hiểu cách chẩn đoán và giải quyết các vấn đề có thể phát sinh cụ thể với các thành phần quan trọng này.
Làm thế nào để đồng bộ hóa động cơ Quarky? #
Làm theo hướng dẫn để đồng bộ hóa động cơ
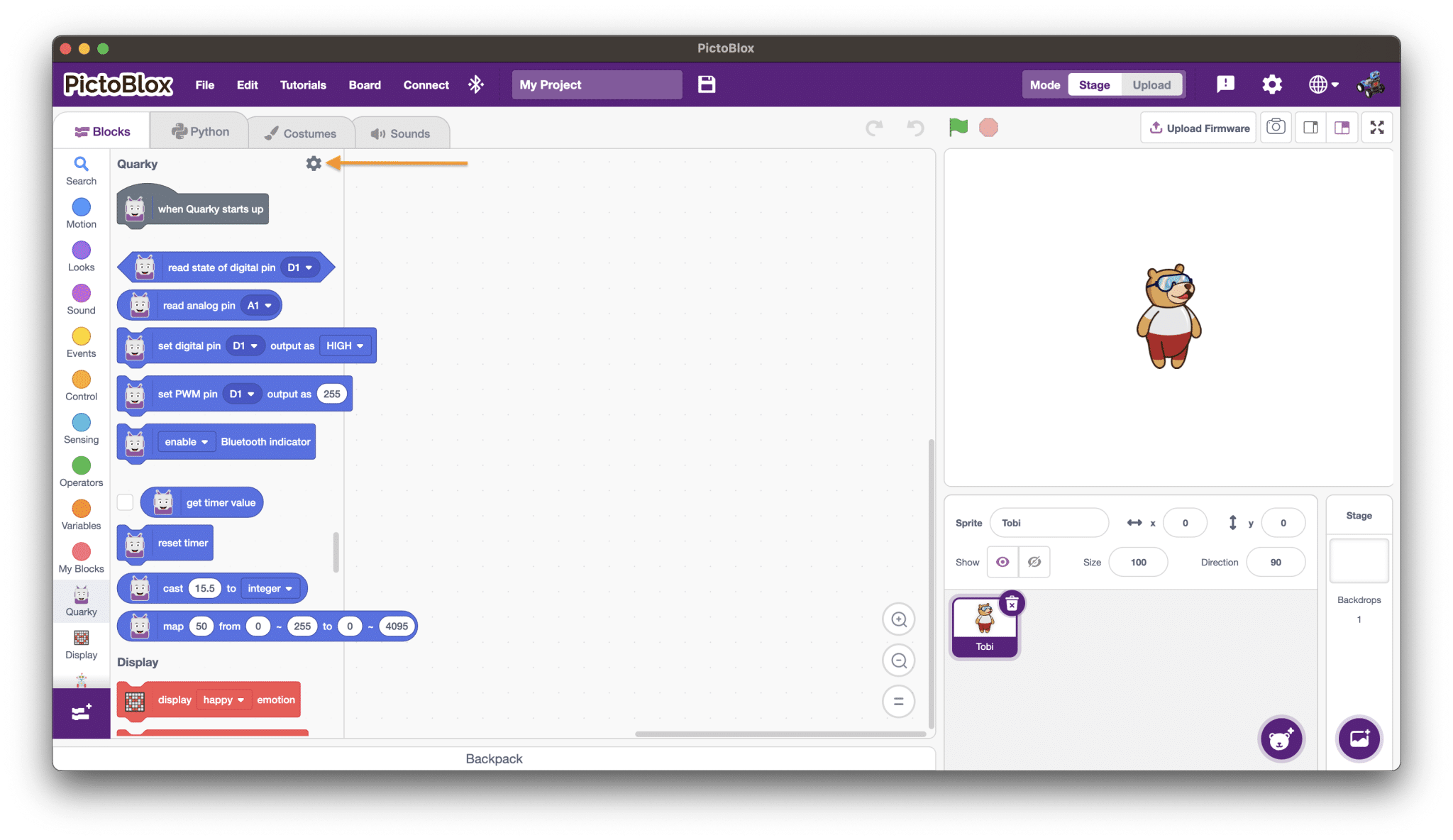
Bước 1: Truy cập Cài đặt Quarky: Mở Bảng màu Quarky và điều hướng đến phần Cài đặt Quarky.
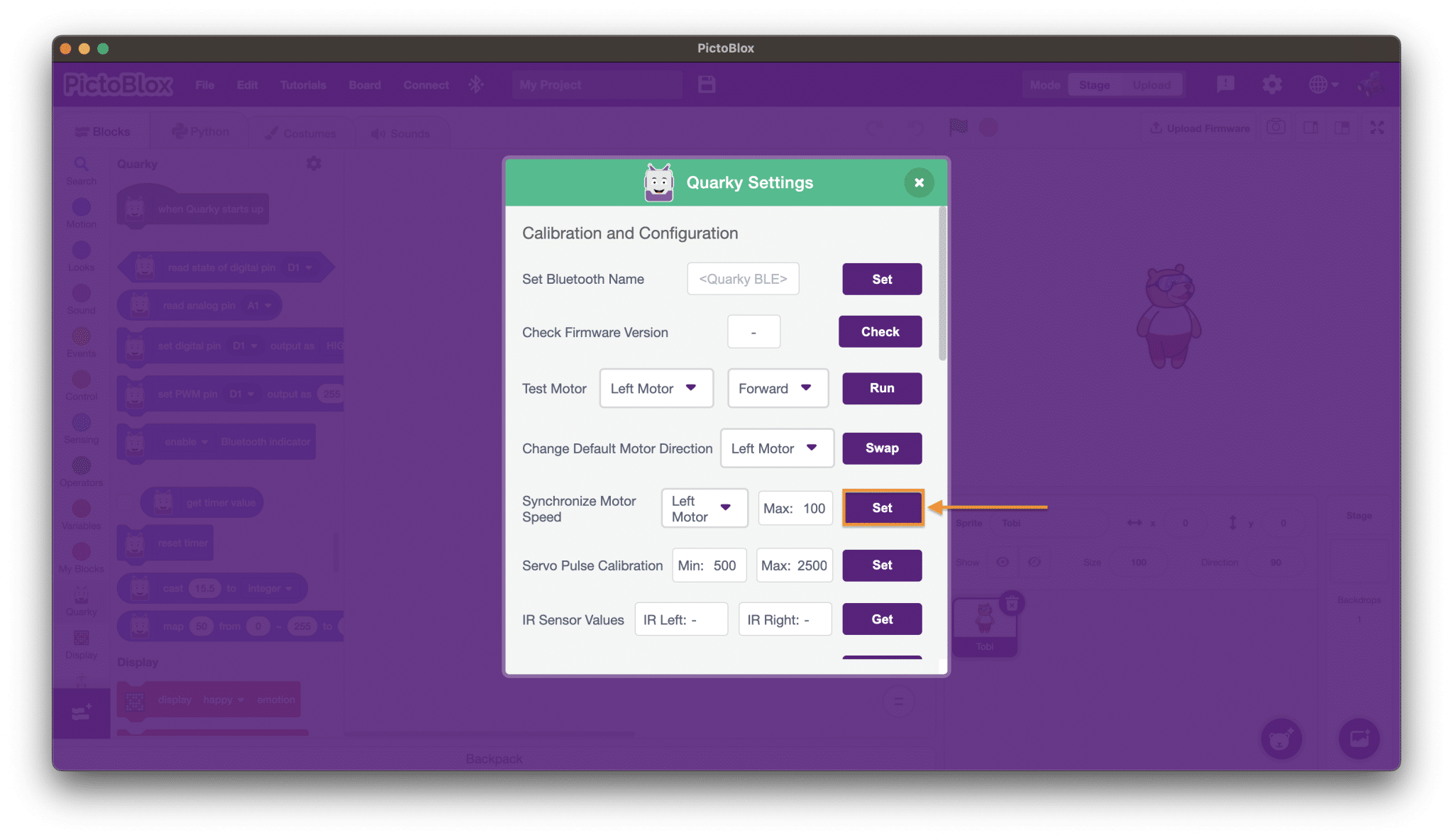
Bước 2: Hiệu chỉnh và cấu hình: Trong các tùy chọn hiệu chỉnh và cấu hình, hãy xác định cài đặt cho tốc độ động cơ được đồng bộ hóa.
Bước 3: Điều chỉnh tốc độ động cơ: Sửa đổi tốc độ động cơ và thực hiện các điều chỉnh cần thiết để hiệu chỉnh và đồng bộ hóa động cơ.
Bằng cách làm theo các bước này, bạn có thể đồng bộ hóa động cơ Quarky bằng cách điều chỉnh tốc độ động cơ trong phần Cài đặt Quarky.
Loại động cơ là gì? #
Quarky được trang bị động cơ N20 DC Geared. Trung bình, động cơ này hoạt động ở tốc độ 60-80 vòng/phút (Rotations Per Minute) và cung cấp mô-men xoắn 0,5 Kg/cm.
Tốc độ và mô men xoắn cực đại của động cơ là bao nhiêu? #
Động cơ được sử dụng trong Quarky có tốc độ trung bình 60 vòng/phút (Vòng quay mỗi phút) và cung cấp mô-men xoắn 0,5 Kg/cm.
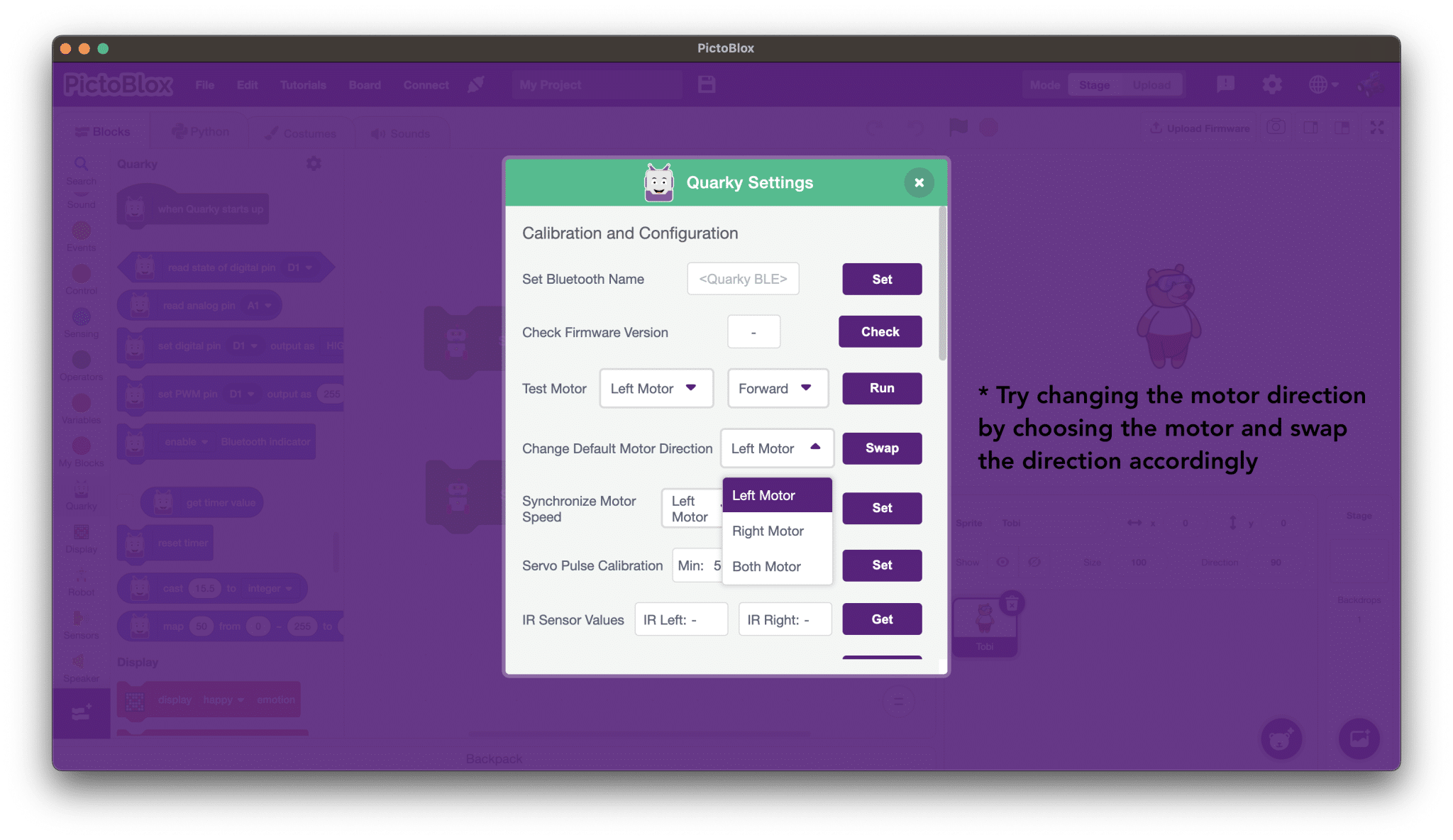
Làm thế nào để sửa lỗi quay động cơ nếu động cơ quay sai hướng? #
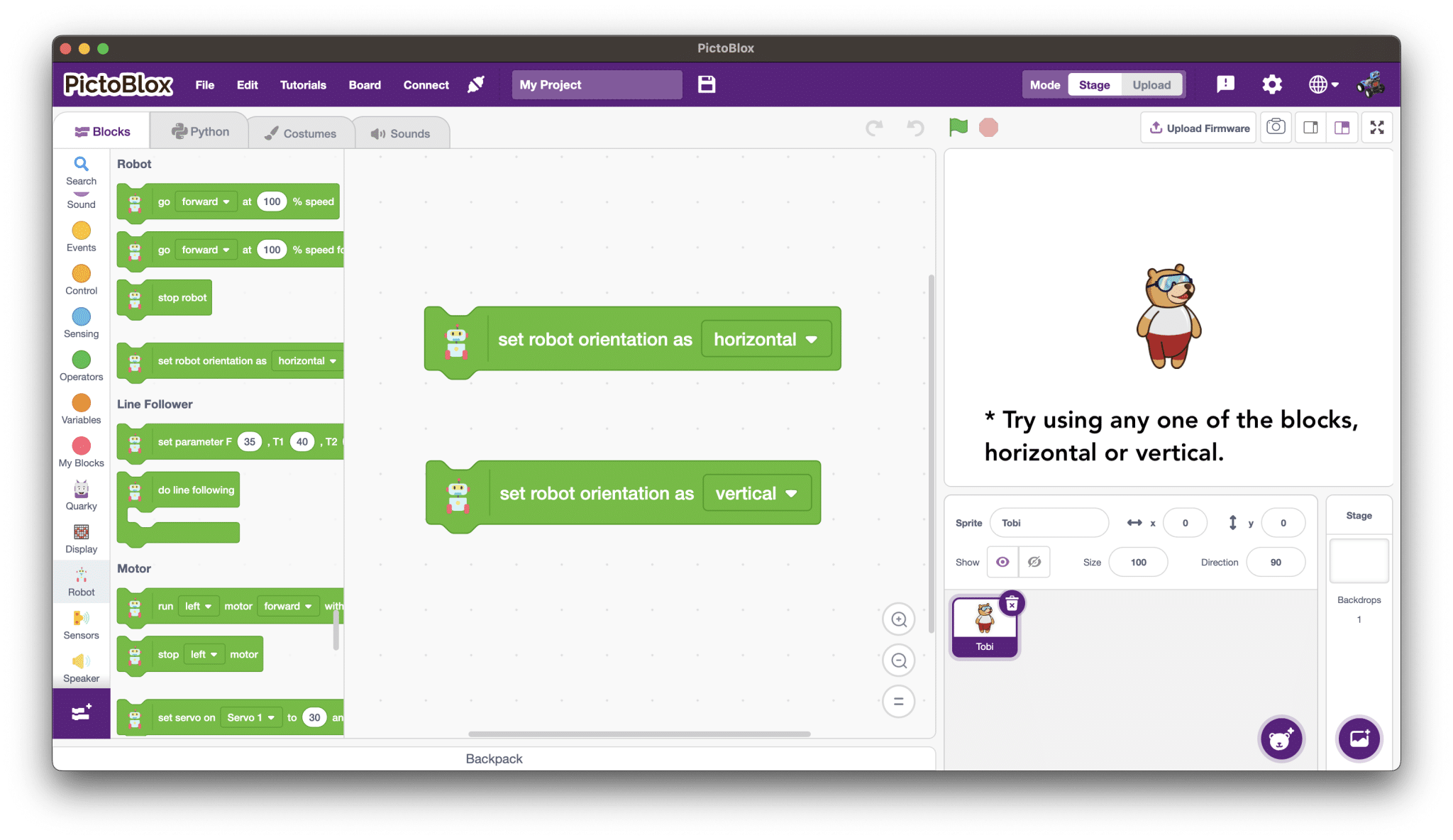
Trước tiên, hãy thử thay đổi hướng thành Ngang hoặc Dọc từ bảng Robot. Nếu điều đó không hiệu quả
Đi tới cài đặt Quarky và bạn sẽ thấy tùy chọn thay đổi hướng động cơ trong phần Hiệu chỉnh và Cấu hình , chọn động cơ và đổi hướng cho phù hợp.
Đi tới cài đặt Quarky và bạn sẽ thấy tùy chọn thay đổi hướng động cơ trong phần Hiệu chỉnh và Cấu hình , chọn động cơ và đổi hướng cho phù hợp.