Vui cùng Robot
Tổng quan bài học
Bạn đã bao giờ tự hỏi điều gì khiến robot trở thành robot chưa? Tại sao chúng hữu ích và chúng siêu hữu ích trong lĩnh vực nào?
Trong bài học này, chúng ta sẽ trả lời tất cả những câu hỏi này VÀ tạo ra một robot của riêng mình bằng Quarky!
Chủ đề được đề cập
- Robot là gì?
- Ưu điểm của robot
- Ứng dụng của robot
- Làm thế nào để tạo ra một robot bằng Quarky?
Kết quả học tập
Kết thúc bài học này, bạn sẽ có thể:
- Hiểu robot là gì.
- Đánh giá cao những lợi thế của robot.
- Hãy di chuyển robot của riêng bạn.
Nội dung bài học
- Tổng quan về Robot
-
Câu đố 2: Vui nhộn cùng Robot
Tổng quan về Robot
Giới thiệu
Robot , nói một cách đơn giản, là bất kỳ cỗ máy nào được thiết kế để thực hiện một nhiệm vụ . Điều này sẽ khiến bạn phải thốt lên: “Vậy, máy tính, PC, máy hút bụi – tất cả những thứ này cũng là robot à?” Không chính xác. Robot là những cỗ máy sử dụng lập trình để đưa ra quyết định và thực hiện nhiệm vụ.
Ví dụ: tuốc nơ vít là một cỗ máy vì nó thực hiện nhiệm vụ vặn vít và giảm bớt sức lực của con người (ai biết việc xác định một cỗ máy lại có thể đơn giản như vậy?!). Nhưng nó không phải là một robot.
Nếu chúng ta kết hợp nó với một cánh tay robot thì toàn bộ thứ đó có thể được gọi là robot.

Các loại robot
- Robot có thể được điều khiển bởi con người, trực tiếp hoặc từ xa, từ một nơi rất xa.
- Hoặc robot có thể đưa ra quyết định và tự mình làm việc; những robot như vậy được gọi là robot tự động .

- Ngoài ra còn có những robot có thể di chuyển từ nơi này sang nơi khác; chúng được gọi là robot di động .
- Có robot, robot tự động, robot di động và sau đó là robot tự động di chuyển .

Hai cái cuối cùng là những gì chúng ta sẽ thực hiện sau trong khóa học này.
Ưu điểm
Có rất nhiều lợi thế mà robot có hơn con người. Một số trong số đó là:
- Robot không bao giờ mệt mỏi. Họ có thể làm việc ở cùng một tốc độ và tính nhất quán như nhau mà không cần nghỉ ngơi hay nghỉ lễ.
- Chúng rất hữu ích khi bạn cần thực hiện một công việc cụ thể nào đó, chẳng hạn như đóng chai hoặc sơn đi sơn lại ô tô mà không thấy chán. Điều này cho phép chúng ta phát huy hết tiềm năng của mình trong những công việc mà chỉ con người mới có thể thực hiện được.
- Robot rất nhanh. Họ có thể làm được rất nhiều việc trong thời gian ngắn. Điều này, đến lượt nó, giúp tiết kiệm thời gian.
Nguồn: Youtube (ABBRobotics) - Vì robot có thể thực hiện khối lượng công việc lớn hơn trong thời gian ngắn hơn nên tổng sản lượng sẽ tăng lên.
- Robot có thể được sử dụng để thực hiện các nhiệm vụ nguy hiểm đối với con người bình thường. Họ cũng có thể làm việc trong môi trường nguy hiểm mà không sợ bị hư hại.
- Robot có thể thực hiện các nhiệm vụ với độ chính xác và chất lượng cao hơn con người.
Các ứng dụng
Chúng ta có thể tìm thấy robot trong nhiều lĩnh vực – ngay từ việc dọn dẹp nhà cửa cho đến tổ chức sinh nhật trên sao Hỏa. Nói đùa một chút là trong thế giới hiện đại, robot đã tìm được chỗ đứng trong hầu hết mọi lĩnh vực. Một số ứng dụng vô tận của chúng được đưa ra dưới đây:
- Công nghiệp: Để xử lý và di chuyển vật liệu từ nơi này đến nơi khác và cho các mục đích khác như sơn, sản xuất, hàn, v.v.
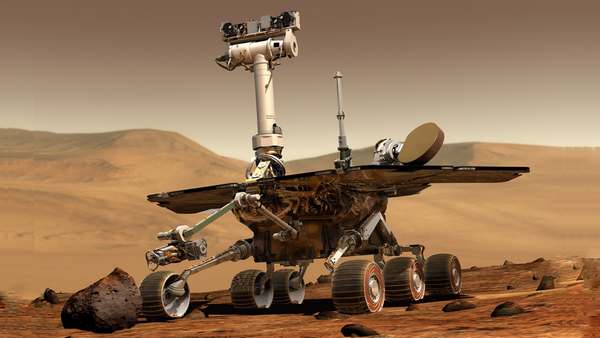
- Không gian: Để khám phá không gian bên ngoài. Ví dụ: Curiosity Rover

- Bệnh viện: Robot phẫu thuật, robot phục hồi chức năng, robot dược phẩm, v.v.
- Vận tải: Xe tự lái, vận chuyển hàng hóa, dịch vụ, v.v.
- Nông nghiệp: Dành cho các nhiệm vụ như hái rau và trái cây.
- Quân sự: Robot phá bom, thám hiểm máy bay không người lái, v.v.
- Hộ gia đình: Dùng cho mục đích nấu ăn, dọn dẹp và giặt giũ.
- Giải trí: Hình người, chó robot, điện thoại di động, máy tính, v.v. Ví dụ: chú chó robot Aibo.





Bây giờ bạn đã biết robot là gì và ưu điểm của chúng là gì, hãy tạo robot của riêng chúng ta với sự trợ giúp của Quarky!
Hoạt động 1: Làm cho robot của bạn di chuyển
Đã đến lúc cho Quarky một số động thái! Chúng ta hãy xem cách làm cho Quarky di chuyển tiến, lùi, phải và trái.
Kết nối Quarky với PictoBlox
Hãy bắt đầu bằng cách kết nối Quarky với PictoBlox. Chọn loại thiết bị ưa thích của bạn và làm theo hướng dẫn.
Máy tính để bàn
Để làm việc với Quarky, bạn có thể kết nối Quarky với PictoBlox theo hai cách:
- Sử dụng cáp USB-C.
- Sử dụng Bluetooth. Để hoạt động với Bluetooth trong PictoBlox, trước tiên bạn cần tải xuống và cài đặt liên kết Scratch,
bạn có thể tải xuống từ liên kết sau : ( danh cho Windows, Dành cho Mac ) .
Thực hiện theo các bước bên dưới để kết nối Quarky với PictoBlox bằng Bluetooth:
- Đầu tiên, bật nguồn Quarky của bạn.
- Bắt đầu liên kết PictoBlox.
- Mở PictoBlox trên máy tính để bàn của bạn.
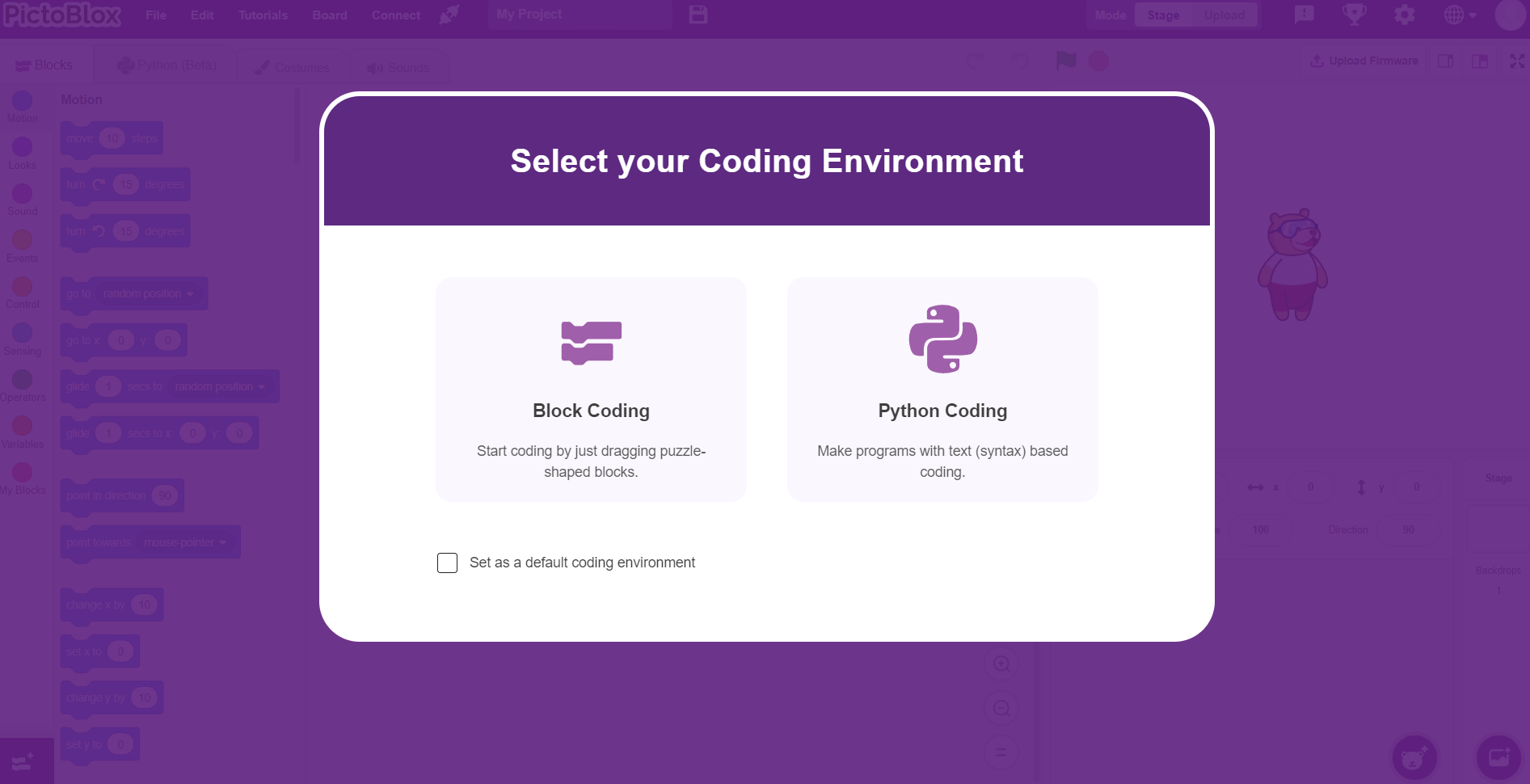
- Sau đó, chọn Block Coding làm môi trường mã hóa của bạn.

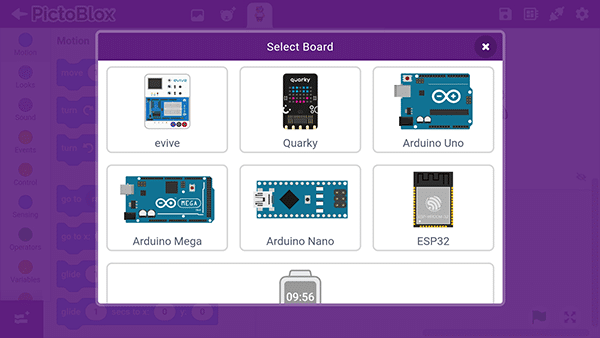
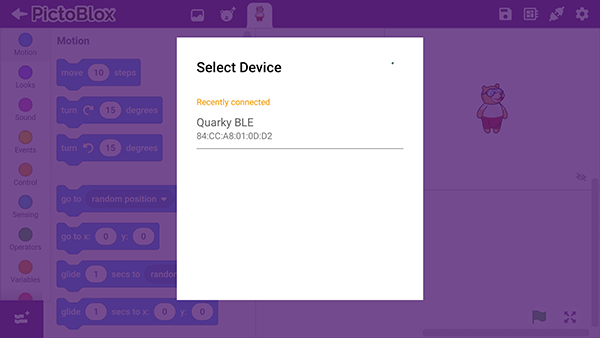
- Sau đó, nhấp vào nút Board trên thanh công cụ và chọn board là Quarky.

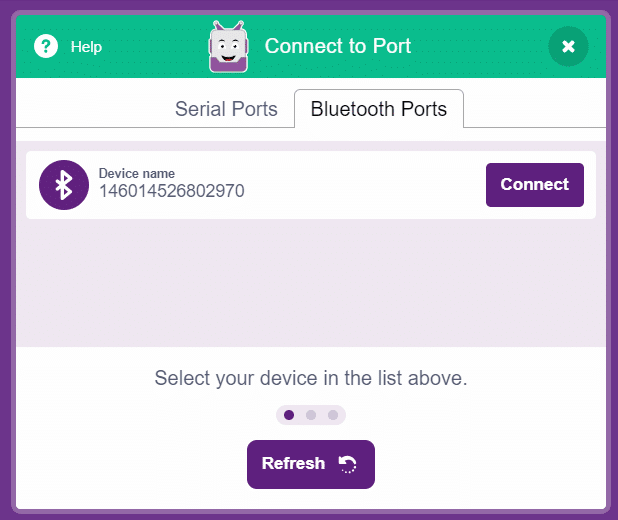
- Tiếp theo, nhấp vào nút Connect. Chúng tôi sẽ kết nối Quarky với PictoBlox bằng Bluetooth, do đó, từ hộp thoại xuất hiện, nhấp vào Cổng Bluetooth và sau đó chọn cổng thích hợp từ danh sách để kết nối Quarky.

Và Voila! Quarky hiện đã được kết nối với PictoBlox.
Điện thoại di động
Thực hiện theo các bước bên dưới để kết nối Quarky với PictoBlox:
- Đầu tiên, BẬT nguồn Quarky.
- Mở PictoBlox trên điện thoại thông minh của bạn. Đi tới Không gian của tôi và tạo dự án mới bằng cách nhấp vào nút ‘+(cộng)’ ở góc dưới cùng bên phải.
- Sau đó, chạm vào nút Board ở góc trên bên phải của thanh công cụ.
- Chọn bảng là Quarky.
- Tiếp theo, chạm vào nút có biểu tượng Connect .
- Chọn tên mô-đun Bluetooth của bạn từ danh sách.
Và Voila! Quarky hiện đã được kết nối với PictoBlox. Bây giờ, hãy tạo một tập lệnh trong PictoBlox để hiển thị các biểu thức trên ma trận Quarky!
Hiểu Nguyên lý hoạt động
Trước khi bắt đầu với kịch bản của mình, trước tiên chúng ta cần hiểu CÁCH để khiến Quarky di chuyển.
Nếu cả hai bánh xe của robot đều quay theo hướng thuận thì nó sẽ chuyển động về phía trước. Có ý nghĩa, phải không?

Tương tự, nếu cả hai bánh xe đều quay theo hướng lùi thì robot sẽ di chuyển về phía sau.

Làm cho robot rẽ trái và phải là một phần khó khăn. Để khiến Quarky rẽ trái, bánh xe bên phải của nó phải quay theo hướng tiến nhưng bánh xe bên trái của nó phải quay theo hướng lùi.
Mặt khác, để khiến Quarky rẽ phải, bánh xe bên trái của nó phải quay theo hướng tiến và bánh xe bên phải phải quay theo hướng lùi.
Bây giờ hãy thử điều này trong PictoBlox!
Hãy viết mã
Chuyển động tiến về phía trước
Hãy viết kịch bản cho robot chạy tiến về phía trước trong 1 giây rồi dừng lại.
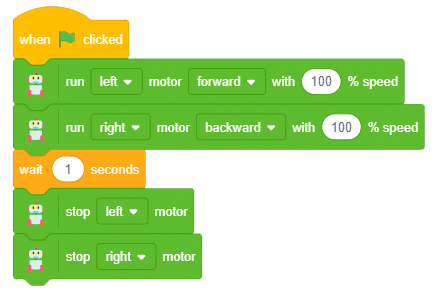
Thực hiện theo các bước bên dưới để tạo tập lệnh di chuyển Quarky:
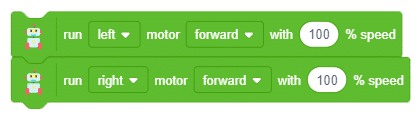
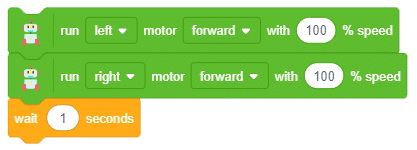
- Đầu tiên, vào bảng Robot và thêm khối run() motor() with() speed . Động cơ bên trái, hướng chuyển động thuận và tốc độ 100% được đặt làm giá trị mặc định.

- Bây giờ, sao chép khối run() motor () với () speed và thêm nó vào bên dưới khối đầu tiên. Chọn động cơ phù hợp từ danh sách thả xuống.

- Tiếp theo, thêm khối wait () seconds từ bảng Control và đặt thời gian chờ là 1 giây.

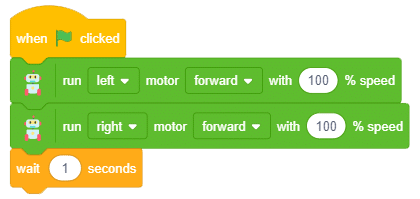
- Kéo và thả khối when flag clicked vào vùng tập lệnh từ bảng Events .

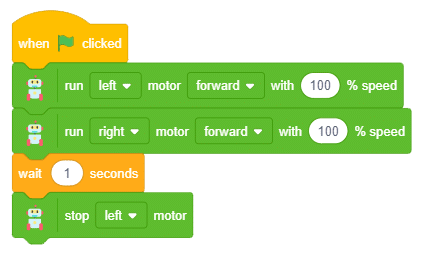
- Tiếp theo, thêm khối stop () motor từ bảng Robot bên dưới khối wait () seconds và chọn left làm tùy chọn.

- Tiếp theo, thêm một khối stop () motor khác từ bảng Robot và chọn right làm tùy chọn.


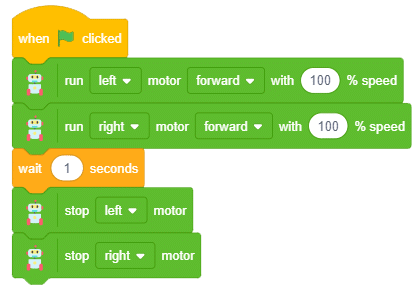
Bây giờ, hãy chạy tập lệnh bằng cách nhấp vào lá cờ màu xanh lá cây. Và robot của bạn đã sẵn sàng khuấy động!
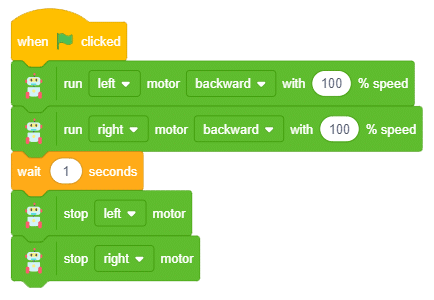
Chuyển động lùi
Hãy chuyển đổi đoạn script trên để robot chạy lùi trong 1 giây rồi dừng lại.
- Thay đổi hướng trong run () motor () with () speed khối tốc độ backward. Điều này sẽ làm cho động cơ bên trái quay lùi.
- Thay đổi hướng ở run () motor () with () speed khối tốc độ backward . Điều này sẽ làm cho động cơ bên phải quay ngược lại.
Kịch bản sẽ trông như thế này:
Và robot của bạn sẽ chạy như thế này:
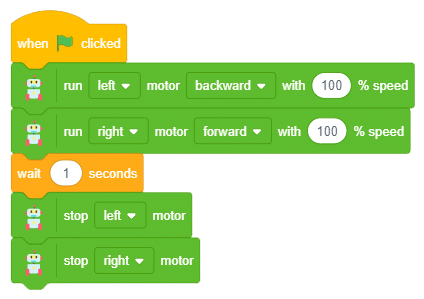
Chuyển động rẽ trái
Chúng ta hãy chuyển đổi đoạn script trên để robot chạy sang trái trong 1 giây rồi dừng lại.
- Thay đổi hướng trong run () motor () with () speed khối tốc độ backward. Điều này sẽ làm cho động cơ bên trái quay lùi.
- Thay đổi hướng trong run () motor () with () speed khối tốc độ để forward . Điều này sẽ làm cho động cơ bên phải chuyển động về phía trước.
Kịch bản sẽ trông như thế này:
Và robot của bạn sẽ chạy như thế này:
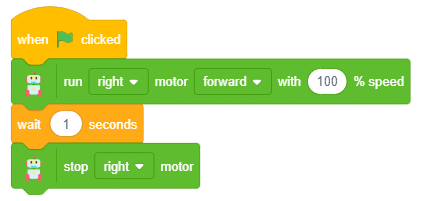
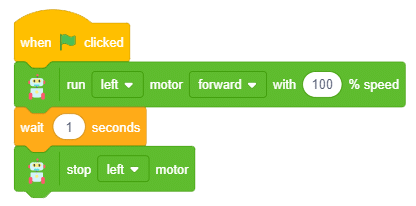
Có một cách khác để bạn có thể chạy robot bên trái:
- Xóa lần run () motor () with () speed . Việc xóa khối này sẽ giữ cho động cơ bên trái đứng yên trong suốt quá trình chuyển động.
- Thay đổi hướng trong trong khối run () motor () with () speed thành forward . Điều này sẽ làm cho động cơ bên phải chuyển động về phía trước.
Kịch bản sẽ trông như thế này:
Và robot của bạn sẽ chạy như thế này:
Với kịch bản này, robot sẽ rẽ trái ở bánh xe bên trái.
Chuyển động rẽ phải
Chúng ta hãy chuyển đổi đoạn script trên để robot chạy bên phải trong 1 giây rồi dừng lại.
- Thay đổi hướng trong khối run () motor () with () speed thành forward. Điều này sẽ làm cho động cơ bên trái đi về phía trước.
- Thay đổi hướng trong khối run () motor () with () speed thành backward . Điều này sẽ làm cho động cơ bên phải quay lùi.
Kịch bản sẽ trông như thế này:
Và robot của bạn sẽ chạy như thế này:
Có một cách khác để bạn có thể chạy robot bên trái:
- Thay đổi hướng trong khối run () motor () with () speed thành forward . Điều này sẽ làm cho động cơ bên trái đi về phía trước.
- Xóa run () motor () with () speed. Việc xóa khối này sẽ giữ cho động cơ bên phải ở trạng thái nghỉ trong suốt quá trình chuyển động.
Kịch bản sẽ trông như thế này:
Và robot của bạn sẽ chạy như thế này:
Với kịch bản này, robot sẽ rẽ phải trên bánh xe bên phải.
Hoạt động 2: Tạo hình vuông
Suỵt! Đó là bí mật.
Đã đến lúc chia sẻ một mẹo nhỏ với bạn!
Như bạn có thể thấy trong đoạn script trên, chúng tôi phải sử dụng các khối riêng biệt cho từng động cơ để khiến Quarky di chuyển. Nhưng điều gì sẽ xảy ra nếu chúng ta muốn nó làm được nhiều việc hơn là chỉ di chuyển, chẳng hạn như nhận dạng đồ vật, thu thập các vật phẩm khác nhau, v.v.? Trong trường hợp đó, tập lệnh sẽ trở nên khổng lồ và khó theo dõi.
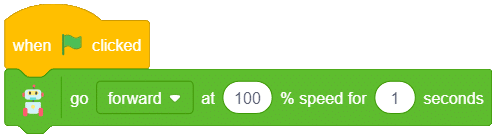
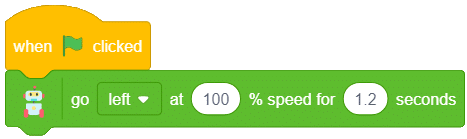
Nhưng bạn đừng lo lắng! Chúng tôi có một giải pháp cho nó. Trong bảng Robot , bạn sẽ tìm thấy một khối có tên go() với tốc độ ()% trong () giây . Sử dụng khối này, bạn có thể làm cho toàn bộ robot di chuyển tiến, lùi, trái hoặc phải thay vì mỗi lần sử dụng các khối cho từng động cơ. Vì vậy, hãy viết lại tập lệnh của chúng ta bằng khối này.
Tất cả những gì bạn phải làm là thay thế cả hai khối run () motor () with () speed cho từng loại chuyển động bằng một khối go () at () % speed for () second.
Và bạn đã hoàn tất! Khá tuyệt phải không? ?
Hãy thử thay đổi các thông số và chạy động cơ theo nhiều cách khác nhau.
Đã đến lúc khám phá!
Bây giờ đến lượt bạn thử điều gì đó. Bạn phải làm cho Quarky quay sang trái 90°.
Bí quyết là điều chỉnh thời gian.
- Overshoot (Vượt quá): Thời gian của bạn nhiều hơn. Giảm giá trị của nó.
- Undershoot ( ít quá): Thời gian của bạn ít hơn. Tăng giá trị của nó.
Chơi với Robot
Bây giờ, đã đến lúc vui chơi với robot! Hãy để Quarky vẽ một hình vuông.
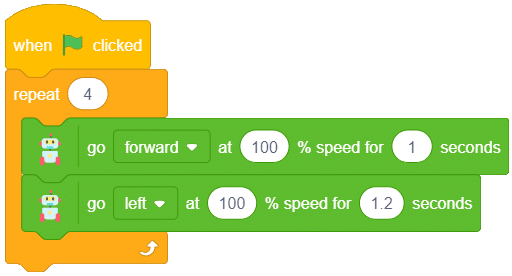
- Đi tới bảng Robot và thêm go () at () % speed for () second. Hướng chuyển động về phía trước –forward , tốc độ 100% và 1 giây được đặt làm giá trị mặc định.
- Sau đó, thêm một khối go () at () % speed for () second và đổi hướng sang trái – Left. Bạn có nhớ bài tập 90° bên trái mà chúng ta đã làm ở trên không? Bạn phải sử dụng cùng thời gian quay như trong bài tập đó. Cho đến bây giờ, chúng tôi đã cho Quarky tiến về phía trước và rẽ trái chỉ một lần. Để tạo một hình vuông, phải lặp lại các bước này ba lần nữa.
- Thêm khối lặp lại – repeat () từ bảng Control và viết số 4 vào khoảng trống. Điều này có nghĩa là tất cả các khối bên trong khối repeat () sẽ chạy 4 lần.
- Thêm cả go () ở () % tốc độ cho () khối thứ hai bên trong khối lặp lại () .
- Hoàn thành tập lệnh bằng cách thêm khối when flag clicked ở trên cùng.
- Bây giờ, hãy chạy tập lệnh bằng cách nhấp vào lá cờ xanh!